工业机器人技术专业人才培养方案
一、专业名称及专业代码
工业机器人技术,460305。
二、入学要求
普通高中毕业、中等职业学校或具备同等学力者。
三、修业年限
三年。
四、职业面向
本专业职业面向如表1所示。
表1 本专业职业面向
所属专业大类 (代码) | 所属专业类(代码) | 对应行业 (代码) | 主要职业类别(代码) | 主要岗位类别或技术领域举例 | 职业资格证书或职业技能等级证书举例 |
装备制造 (46) | 自动化类 (4603) | 通用设备制造业(34); 专用设备制造业(35) | 工业机器人系统操作员(6-30-99-00); 工业机器人系统运维员(6-31-01-10); 自动控制工程技术人员(2-02-07-07); 电工电器工程技术人员(2-02-11-01); 设备工程技术人员(2-02-07-04) | 工业机器人应用系统集成; 工业机器人应用系统运行维护; 自动化控制系统安装调试; 销售与技术支持 | 工业机器人系统操作员; 工业机器人系统运维员; 电工(三级); CAD高级 |
五、培养目标
本专业培养德、智、体、美、劳全面发展,具有一定的科学文化水平,良好的人文素养、职业道德和创新意识,精益求精的工匠精神,较强的就业能力和可持续发展的能力。掌握现代工业机器人安装、调试、维护等方面的专业知识和操作技能,具备机械结构设计、电气控制、传感技术、智能控制等专业技能,能够从事工业机器人系统的基本编程、调试、操作、销售以及车间生产与技术管理等工作的高素质技术技能型人才。
六、培养规格
本专业毕业生应具备的素质、知识和能力要求:
(一)素质
1.坚定拥护中国共产党领导和我国社会主义制度,在习近平新时代中国有特色社会主义思想指引下,践行社会主义核心价值观,具有深厚的爱国主义情感和中华民族自豪感;
2.崇尚宪法、遵纪守法、崇德向善、诚实守信、尊重生命、热爱劳动,履行道德准则和行为规范,具有良好的社会责任感和使命感;
3.勇于奋斗、乐观向上、具有自我管理能力、职业生涯规划意识,有较强的集体意识和团队合作精神;
4.具有安全意识、质量意识、环保意识、工匠精神、创新思维;
5.具有健康的体魄及心理调控能力,掌握基本运动知识和1~2项运动技能,养成良好的行为习惯、健身与卫生习惯;
6.具有一定的审美和人文素养,能够形成1~2项艺术爱好或特长;
7.具备良好的科学文化素质;
8.具有较强的语言表达能力、社会交往能力和自主创业能力;
9.具有团队协作、沟通组织能力,能适应和承受工作和市场竞争的压力。
(二)知识
1. 掌握必备的思想政治理论、科学文化知识和中华优秀传统文化知识;
2. 掌握常用电子元器件、集成器件、单片机的应用知识;
3. 掌握传感器应用的基础知识;
4. 掌握PLC、变频器、触摸屏、组态软件控制技术的应用知识;
5. 掌握交流调速技术的应用知识;
6. 掌握机械系统绘图与设计的知识;
7. 掌握计算机接口、工业控制网络和自动化生产线系统的基础知识;
8. 掌握工业机器人原理、操作、编程与调试的知识;
9. 掌握检修工业机器人系统、自动化生产线系统故障的相关知识;
10.掌握安全用电及救护常识。
(三)能力
1.具有探究学习、终身学习、分析问题和解决问题的能力;
2.具有良好的语言、文字表达能力和沟通能力;
3.能读懂机器人应用系统的结构安装图和电气原理图;
4.能测绘简单机械部件,生成零件图和装配图,跟进非标零件加工,完成装配工作;
5.能维护、保养工业机器人应用系统设备,能排除简单电气及机械故障;
6.能根据自动化生产线的工作要求,编制、调整工业机器人控制程序;
7.能根据工业机器人应用方案要求,安装、调试工业机器人及应用系统;
8.能应用操作机、控制器、伺服驱动系统和检测传感装置,编制逻辑运算程序;
9.能收集、查阅工业机器人技术资料,对已完成的工作进行规范记录和存档;
10.具备基本的计算机操作与办公软件应用能力;
11.具备牢固的安全观念和一定的创新、创意设计能力。
七、课程设置及要求
(一)课程体系设计思路
1. 以工作过程为导向,使课程体系设计由单一学科向学习过程和工作过程相结合的模块化课程体系转化,按照实际的工作任务、工作过程和工作情景,对内容相互关联的、具有综合可能条件的课程适当整合成一门课程,改变专业教育中每一领域所需知识和能力分散为几门专业课程来完成的现状。
2. 紧密结合职业资格证书,课程设置与职业内容相衔接,课程内容与职业考核内容融合,注重职业能力的培养。
3. 学时优先安排实践比重大的课程;未经优化和重构的专业基础理论课程以必需为原则;体现学生个性发展以及扩大知识面方面的课程,采用讲座、选修、自修等多种形式安排。
(二)职业能力分析与课程设置
根据本专业所面向的工作岗位群,分析对应的主要岗位和工作任务,以岗位为切入点,分析应具备的职业能力及对应的课程(含实习实训)见表2
表2 工作岗位对应职业能力分析与课程设计
序号 | 工作领域 | 工作任务 | 职业能力 | 开设课程 |
1 | 工业机器人操作与应用 | 1.工业机器人基础编程 | 1)任意直线运动程序编制; | 1)C语言程序设计基础; 2)单片机技术; 3)工业机器人现场编程基础; 4)工业机器人离线编程与仿真 |
2)任意曲线运动程序编制; | ||||
3)任意曲线运动焊接程序编制及人机界面设计; | ||||
4)任意轨迹运动程序编制及人机界面设计; | ||||
2.工业机器人操作与应用 | 1)具有熟悉操作设备的能力; | 1)工业机器人应用实训 | ||
2)能根据自动化生产线的工作要求,编制、调整工业机器人的控制流程; | ||||
3)能使用常用的电工工具; | ||||
4)具备安全操作意识严格按照行业操作规程进行操作,遵守各项工艺规程; | ||||
5)能够进行机器人的基本操作,切换坐标,调整机器人的运行速度; | ||||
6)能够在工业机器人完成控制要求过程中,进行运行轨迹的设置; | ||||
2 | 工业机器人工作站 | 1.工业机器人安装 | 1)能够进行可编程、传感器、变送器、驱动器的安装、接线以及与组态联接; | 1)机械制图; 2)机械工程基础; 3)液压与气动技术; 4)自动检测与转换技术; 5)电气控制及PLC技术; 6)组态与现场总线技术; 7)工业机器人应用实训 |
2)能够完成可编程控制器程序的输入、输出、修改及与组态联接测试; | ||||
3)能够进行可编程控制器变量操作与组态数据库的建立及导入导出; | ||||
4)能够完成实现系统功能的运行脚本和控制策略的编辑; | ||||
5)能够完成上位监控主机与现场控制器的通信设置; | ||||
6)能识读低压电气产品控制原理图、接线端子图及元件布置图; | ||||
7)会选择熔断器、空气开关、接触器、继电器、电度表、电流表、电压表、互感器等低压电气元件; | ||||
8)会识别及选用导线的材质、规格、绝缘等级,并会识别选用产品柜体规格及防护等级; | ||||
9)会使用螺丝刀、剥线钳、互感器、验电器、万用表、电钻等工具; | ||||
10) 会执行安装工艺,以便在柜体中合理的布置导线及配套低压电气元件。 | ||||
2.工业机器人安装及故障诊断 | 1)能够进行系统集成的综合调试; | 1)机械制图; 2)机械工程基础; 3)液压与气动技术; 4)自动检测与转换技术; 5)电气控制及PLC技术; 6)工业机器人应用实训; 7)工业机器人系统智能运维 | ||
2)会控制功能测试; | ||||
3)能够正确判断电气控制设备元器件的好坏; | ||||
4)能够查找、排除电气控制设备故障; | ||||
5)能够进行触电及电气火灾的应急处理; | ||||
6)会按工程验收标准对产品整机功能的性能与质量进行检验; | ||||
7)会填写安装及试验记录; | ||||
8)能够资料整理、归档、保存。 | ||||
3 | 工业机器人售后 | 1.工业机器人的维修与保养 | 1)会使用万用表、信号发生器、示波器、晶体管毫伏表等测量仪表; | 1)机械制图; 2)机械工程基础; 3)液压与气动技术; 4)电工电子技术; 5)机器人现场编程基础; 6)自动检测与转换技术; 7)工业机器人系统智能运维 |
2)知道PLC、单片机、变频器、触摸屏、交直流电机、变压器的基本结构和工作原理; | ||||
3)能够进行电力拖动系统的运行性能、参数设定; | ||||
4)会使用机器人仿真软件使用及离线仿真; | ||||
5)会排除线路一般故障; | ||||
6)会填写测试报告与检修单。 | ||||
4 | 工业自动化生产线 | 1.工业自动化生产线安装、调试与维修 | 1)掌握工业自动化技术所必需的基础理论知识; | 1)机械制图; 2)机械工程基础; 3)液压与气动技术; 4)工业机器人应用实训; 5)工业机器人系统智能运维 |
2)掌握电工、电子、液压、气动在工业自动化设备中的应用技术知识; | ||||
3)具有机器人及其自动线安装调试规范; | ||||
4)具有电子电气元件的选用和维护技能; | ||||
5)具有常用仪器仪表的使用和维护技能; | ||||
6)有工厂电气设备的安装、调试、维修技能; | ||||
7)具有液压、传动系统的安装、调整和维修技能; | ||||
8)具有应用计算机、单片机、可编程序控制器的基本能力。 |
(三)课程体系框架
课程体系架构以职业技术技能的培养为主线,由公共基础课程、专业基础课程、专业核心课程、集中实践课程、专业拓展课程五个层面构成。图1所示。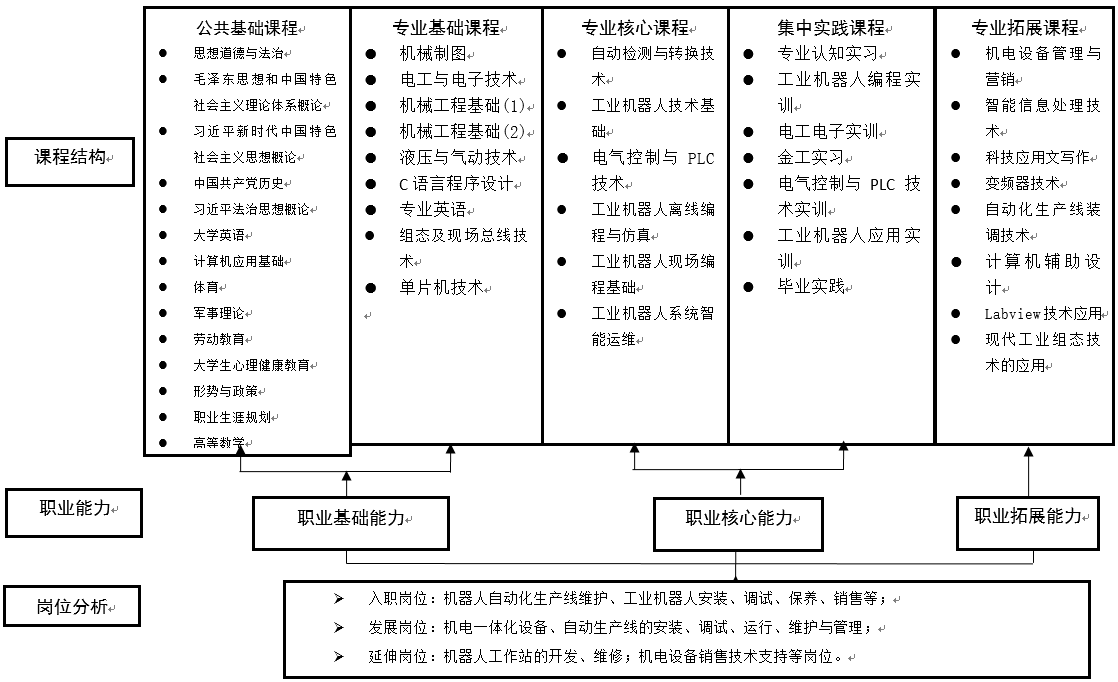
图1 课程体系结构框架图
(四)主要课程描述
专业课程教学目标、主要教学内容及学时学分详见表3。
表3 专业课程及集中实践课
序号 | 课程名称 | 教学目标 | 主要教学内容 | 学分/学时 |
1 | 机械制图 (专业基础课程) | 了解国家制图标准,掌握投影法的基础理论及其应用,机件形状的常用表达方法,标准件的绘制,中等复杂程度的零部件绘制。 | 教学内容包括:制图基本知识与技能;正投影作图基础;立体及其表面交线;轴测图绘制;组合体的绘制与识读;机械图样的基本表示方法。 | 4/64 |
2 | 电工电子技术(专业基础课程) | 培养本专业学生掌握常用电子器件的使用,理解典型模拟电路、数字电路特性,掌握电子电路分析、设计、制作、调试等环节的基本技能。 | 教学内容包括:直流电路;正弦交流电路;安全用电;常用半导体器件;基本放大电路;直流稳压电源;逻辑事件及其表示方法;逻辑门电路的应用;时序逻辑电路。 | 4/64 |
3 | 机械工程基础(1)(专业基础课程) | 深刻理解工程力学的基本概念和基本定律,熟练掌握解决工程力学问题的定理和公式。能将实际物体简化成准确的力学模型,应用力学基本概念和定理解决相关力学问题。 | 教学内容包括:静力学基础、力系的简化、力系的平衡 。材料力学部分包括杆件的四种基本变形(轴向拉伸与压缩 、剪切与挤压、扭转 、弯曲)的内力、应力和变形,组合变形杆的强度计算。 | 3/52 |
机械工程基础(2)(专业基础课程) | 掌握一般机械中常用机构和通用零件的工作原理、性能特点,及其使用、维护的基础知识;掌握常用机构的基本理论,常用零部件失效形式、设计准则和设计方法的了解,学会查用图表、标准、规范和手册等技术资料。 | 教学内容包括:机械设计基础概论;平面连杆机构;凸轮及间隙运动机构;带传动和链传动;齿轮传动;蜗杆传动与螺旋传动;齿轮系;联 接;轴和轴承。 | 3/52 | |
4 | 组态及现场总线技术(专业基础课程) | 了解现场总线的特点、系统构成、监控组态软件原理、现场总线系统的工程设计等;掌握计算机网络基本知识、工业网络通信特点,以及现场总线的基本概念和目前在工业现场使用最多的PROFIBUS-DP、PROFIBUS-PA的基本原理和具体应用。 | 教学内容包括;工业网络与通信基础知识;PROFIBUS基础与安装技术;PROFIBUS现场总线应用举例;其他常见现场总线介绍。 | 3/56 |
5 | 液压与气动技术(专业基础课程) | 掌握液压与气动的基础知识,掌握液压元件及气动元件的工作原理,了解其结构及使用方法,具有选用、维修液压元件与气动元件的能力;了解液压实验的基本原理、设备,具有一定的实验操作技能和正确分析实验结果的能力。 | 教学内容包括:液压技术认知;Y04-100液压机液压系统的组装与调试;WA68Y-63折弯机液压控制系统的分析;MJ-50数控车床液压系统的分析;YT4543组合机床动力滑台液压系统的分析;气动机械手控制系统的组装与调试。 | 2/42 |
6 | C语言程序设计基础(专业基础课程) | 掌握基本的程序设计过程和技巧;具备熟练 TURBO C集成环境进行C语言的编写、编译与调试的能力;具备初步的高级语言程序设计能力。 | 教学内容包括:Turbo C软件的安装、使用;数据类型、运算符合表达式的概念及应用;程序设计、数组及函数的应用;指针、位运算及文件的概念及应用。 | 3/48 |
7 | 单片机技术(专业基础课程) | 了解单片机的概念与种类,了解各种单片机的最新发展水平和方向;熟悉常用单片机的基本结构、最小系统、工作过程及应用特点;熟练使用keil软件的主要功能,利用Keil软件开发项目的流程。 | 教学内容包括:单片机硬件系统及软件开发系统;单片机并行I/O端口及C51基础;定时/计数与中断系统;显示和键盘接口技术;A/D与D/A转换接口。 | 3/48 |
8 | 专业英语(专业基础课程) | 通过本课程的学习,使学生显著提高学生阅读原文专业书刊和翻译国外设备技术文件的能力,同时巩固和加深已有专业知识,了解本学科的发展前沿及国外本学科领域的发展趋势。 | 机电专业英语文体结构和特点及表达方式;机电专业英语词法基础;机电专业英语阅读概论;机电专业英语阅读技巧;专业英语翻译的标准与过程。 | 2/42 |
9 | 工业机器人技术基础(专业核心课程) | 了解工业机器人的概念及发展概,掌握工业机器人的基本组成和主要技术参数;熟悉常用工业机器人本体结构,掌握关节型机器人基座、腰部、手臂、手腕等结构特点及功能,熟悉常用驱动与传动方式,能通过关节运动控制机器人到指定位姿;熟练使用RobotStudio软件的主要功能;会手动操纵IRB120机器人。 | 教学内容包括:工业机器人概述;工业机器人的基础知识;操作机;控制器;示教器;辅助系统;基本操作与基础编程;工业机器人应用;ABB离线编程软件RobotStudio的应用。 | 3/56 |
10 | 电气控制与PLC技术(专业核心课程) | 熟悉常用控制电器的结构原理、用途、型号及选用方法,了解和掌握基本电气控制系统的分析与设计方法。在此基础上,学习可编程控制器(PLC)的基本原理及三菱(FX2N)系列PLC的指令系统。 | 教学内容包括:常用低压电器;典型生产机械电气控制;可编程控制器概述;可编程控制器的工作原理和基本结构;基本逻辑指令;步进顺控指令;功能指令;可编程控制器的应用;S7-200可编程控制器。 | 3/56 |
11 | 自动检测与转换技术(专业核心课程) | 掌握压力、流量、温度、液位等非电量的测量方法,工业检测中常用的传感器的基本性能结构、工作原理、测量电路和基本应用,要求学生掌握较为扎实的传感器和自动检测的知识和技能。 | 教学内容包括:检测技术的基本概念;检测技术与检测元件;检测仪表;温度的测量;压力的测量;液位的测量;流量的测量;检测系统的抗干扰技术;检测技术的综合应用。 | 3/56 |
12 | 工业机器人现场编程基础(专业核心课程) | 熟悉ABB机器人安全注意事项,掌握示教器的各项操作;掌握ABB机器人的基本操作,理解系统参数配置;会手动操纵机器人;掌握ABB机器人I/O标准板的配置,会定义输入、输出信号;掌握ABB机器人的各种程序数据类型,熟悉工具数据、工件坐标、有效载荷数据的设定;掌握RAPID程序及指令,能对ABB机器人进行编程和调试;熟悉ABB机器人的硬件连接。 | 教学内容包括:ABB机器人基础知识及手动操作;ABB机器人的I/O配置;ABB机器人程序数据;ABB机器人程序的编写;ABB机器人的总线通信;机器人TCP练习;机器人搬运码垛;机器人智能分拣。 | 3/56 |
13 | 工业机器人离线编程与仿真(专业核心课程) | 了解工业机器人工程应用虚拟仿真的基础知识、机器人虚拟仿真的基本工作原理;掌握机器人工作站构建、RobotStudio中的建模功能、机器人离线轨迹编程、Smart组件的应用、带轨道或变位机的机器人系统创建于应用。 | 安装工业机器人仿真软件;构建基本仿真工业机器人工作站;RobotStudio中的建模功能;机器人离线轨迹编程;Smart组件的应用;带导轨和变位机的机器人系统创建与应用 | 2/42 |
14 | 工业机器人系统智能运维(专业核心课程) | 能掌握相应的控制系统设计与编程知识;具备工业机器人控制系统的安装与调试能力 | 工业机器人安装调试基础;工业机器人的执行机构;工业机器人的传感系统;工业机器人的传动系统与驱动系统;工业机器人的控制;工业机器人的调整与保养 | 3/52 |
15 | 电工电子实训(集中实践课程) | 能正确使用常用的电工仪表、电子仪器及电工设备;能按电路图接线、查线和排除简单的线路故障;学习查阅手册,对常用的电子原器件具有使用的基本知识。 | 电路元件伏安特性的测绘;电位、电压的测定;基尔霍夫定律和叠加原理的验证;戴维南定理的验证;用三表法测量电路等效参数。 | 1/28 |
16 | 专业认知实习(集中实践课程) | 让学生了解所学的专业内涵、了解本专业对应的产业现状以及毕业后的就业环境和岗位等,使学生对所学专业有一个正确的认知,明确学习目标。 | 主要包括:专业介绍、校内专业实训室熟悉、企业参观、行业(企业)专家讲座、毕业学长返校讲座等。 | 1/28 |
17 | 金工实习(集中实践课程) | 熟悉机械制造的一般过程,掌握金属加工的主要工艺方法和工艺过程,熟悉各种设备和工具的安全操作使用方法;了解新工艺和新技术在机械制造中的使用;掌握对简单零件冷热加工方法选择和工艺分析的能力;培养学生认识图纸、加工符号及了解技术条件的能力。 | 划线、锯切、锉削、钻孔、螺纹加工的基本操作方法和应用;钻床的主要结构,传动系统和安全使用方法,了解扩孔、铰孔等方法;车削加工的工艺特点和加工范围;铣削加工方法及所用刀具种类、用途和安装方法。 | 2/56 |
18 | 工业机器人编程实训(集中实践课程) | 熟练掌握手动操纵机器人;会配置ABB机器人I/O标准板,会定义输入、输出信号;会设定ABB机器人的各种程序数据类型,熟悉工具数据、工件坐标、有效载荷数据;会编写RAPID程序,能对ABB机器人进行编程和调试。 | 工业机器人描轨程序的编写和调试;工业机器人搬运程序的编写和调试;工业机器人码垛程序的编写和调试;工业机器人末端执行器的组装和调试。 | 1/28 |
19 | 电气控制与PLC技术实训(集中实践课程) | 掌握继电器控制的基本原理、控制线路安装、分析与设计;掌握PLC基本原理、指令系统及应用、程序设计与调试方法;掌握电器及PLC应用系统的设计与调试方法;具有设计、改造、革新一般生产机械控制系统的初步能力。 | 电动机正反转电气控制;电动机星三角启动电气控制;电动机顺序启停PLC控制;交通灯的控制;机械手PLC控制;电镀生产线PLC控制;机械滑台PLC控制;运料小车PLC控制。 | 1/28 |
20 | 工业机器人应用实训(集中实践课程) | 了解工业机器人搬运应用;了解工业机器人码垛应用; | 工业机器人搬运生产线; 工业机器人码垛生产线。 | 1/28 |
21 | 机电设备管理与营销(专业拓展课程) | 了解制造业与机电设备及其市场营销环境;了解机电设备的整体概念、机电设备的生命周期与营销策略;熟悉机电设备发展策略、机电设备组合、机电设备的品牌;熟悉机电设备开发的基本要求、开发程序、经济分析。 | 机电产品市场营销概念;机电产品营销环境分析;机电产品购买行为分析;机电产品市场调查与预测;机电产品目标市场策略;机电产品开发策略;机电产品价格策略;机电产品促销策略。 | 2/42 |
22 | 智能信息处理技术(专业拓展课程) | 了解人工智能的概念和应用;熟悉模型理论的基础,掌握模糊规则与推理;掌握神经网络信息处理的基本原理及模型;掌握遗传算法的模型与算法;理解反向选择算法和人工免疫系统模型。 | 人工智能导论;模糊理论及其应用;神经网络信息处理;遗传算法及其应用;信息融合技术及其应用;免疫算法。 | 2/42 |
23 | 科技应用文写作(专业拓展课程) | 了解自然科学研究的根本原理和技术;掌握学位论文与科学文章的写作方法;掌握分析测验与调查资料的能力;掌握撰写科技文章的能力。 | 科学技术研究方法概论;科技课题类型与科研选题;科研设计与试验实施;论文模范与写作技巧;投稿修稿与论文发表;开题报告、学位论文、文章写作。 | 2/42 |
24 | 计算机辅助设计 (专业拓展课程) | 掌握机械制图中机件的表达方法及《机械制图国家标准》的有关规定;掌握轴套类、盘盖轮类、箱壳类、叉架类零件的视图表达、尺寸标注。 | 教学内容包括:投影基础;机件的表达方法;读零件图;计算机绘图。 | 2/42 |
25 | 变频器技术(专业拓展课程) | 掌握变频器的基本功能及基本功能;熟练掌握变频器的基本操作方法;掌握变频器在调速系统中的应用;掌握变频器的选择和维护方法。 | 变频器的基本功能及工作原理;变频器的基本操作;变频器的优化特性设置;变频器在调速系统中的应用;变频器的选择与维护。 | 2/42 |
26 | 自动化生产线装调技术(专业拓展课程) | 熟悉机械与气动元件的结构和应用,常用机构作用与工作原理,基本气动回路的工作过程;熟悉自动化生产线控制系统的结构和基本功能;掌握西门子PLC控制系统的设计方法。 | 认知YL-335B型自动化生产线实训设备;认知YL-335B自动线设备的电气控制;自动化生产线的核心技术在YL-335B的应用;嵌入式人机界面组态技术。 | 2/42 |
27 | Labview技术应用(专业拓展课程) | 掌握Labview的开发环境、重要概念和编程基本过程 | Labview的开发环境;Labview的数据类型、数组控件及常量的创建与使用;For/While Loop、Charts与Graphs的概念、创建与使用;Case Structure、Sequence Structure与Formula Node的创建和使用;Labview中的属性节点与调节节点的创建和使用。 | 2/42 |
28 | 现代工业组态技术的应用(专业拓展课程) | 了解现场总线的特点、系统构成、监控组态软件原理、现场总线系统的工程设计等;掌握计算机网络基本知识、工业网络通信特点,以及现场总线的基本概念和目前在工业现场使用最多的PROFIBUS-DP、PROFIBUS-PA的基本原理和具体应用。 | 现场总线技术概述;工业网络与通信基础知识;PROFIBUS基础与安装技术;PROFIBUS现场总线应用举例;其他常见现场总线介绍。 | 2/42 |
(五)实践性教学环节
表4 实践教学安排
主要专业课程实践教学安排 | |||
序号 | 主要专业课程名称 | 学时 | 安排学期 |
1 | 电工与电子技术 | 32学时 | 1 |
2 | 液压与气动技术 | 10学时 | 3 |
3 | C语言程序设计 | 24学时 | 2 |
4 | 组态及现场总线技术 | 20学时 | 3 |
5 | 单片机技术 | 24学时 | 4 |
6 | 自动检测与转换技术 | 20学时 | 3 |
7 | 工业机器人技术基础 | 16学时 | 3 |
8 | 工业机器人系统智能运维 | 24学时 | 4 |
9 | 工业机器人现场编程基础 | 28学时 | 4 |
10 | 电气控制与PLC技术 | 28学时 | 2 |
11 | 工业机器人离线编程与仿真 | 21学时 | 4 |
集中实践教学环节安排 | |||
序号 | 主要实践教学环节名称 | 周数 | 安排学期 |
1 | 军事技能 | 2周 | 1 |
2 | 专业认知实习 | 1周 | 1 |
3 | 电工电子实训 | 1周 | 2 |
4 | 金工实习 | 2周 | 3 |
5 | 电气控制与PLC技术实训 | 1周 | 3 |
6 | 工业机器人编程实训 | 1周 | 4 |
7 | 工业机器人应用实训 | 1周 | 4 |
8 | 顶岗实习(含毕业答辩) | 32周 | 5/6 |
八、教学进程总体安排
(一)教学活动周进程安排
表5 教学活动周进程安排(周)
理论教学 | 理实一 体教学 | 实践 教学 | 入学 教育 | 军事技能 | 顶岗 实习 | 考试 | 机动 | 假期 | 合计 | |
第一学期 | 15 | 1 | 1 | 2 | 1 | 4 | 24 | |||
第二学期 | 17 | 1 | 1 | 1 | 8 | 28 | ||||
第三学期 | 15 | 3 | 1 | 1 | 4 | 24 | ||||
第四学期 | 15 | 3 | 1 | 1 | 8 | 28 | ||||
第五学期 | 17 | 1 | 2 | 4 | 24 | |||||
第六学期 | 15 | 2 | 17 | |||||||
总计 | 62 | 8 | 1 | 2 | 32 | 5 | 7 | 28 | 145 |
注:第一学期实践教育1周灵活安排。
(二)专业教学进程安排
表6 工业机器人技术专业教学进程表
请插入 EXCEL 表 19-1(附后)
九、实施保障
主要包括师资队伍、教学设施、教学资源、教学方法、教学评价、质量管理等方面,应满足培养目标、人才规格的要求,满足教学安排的需要,满足学生的多样学习需求,积极吸收行业企业参与。
(一)师资队伍
1.专业带头人要求
除满足专任教师应具备的基本条件外,专业带头人应具有5年以上累计企业工作经历和深厚专业背景,能把握行业发展动态;能统筹规划和组织专业建设,引领专业发展,能够主持专业的教改科研和产品研发,技术服务等工作。
2.专任教师要求
(1)具有良好的职业素养、职业道德及现代职教理念,具有可持续发展的能力;
(2)具有先进的制造及自动控制技术相关专业知识;
(3)能够调配、规划实验实训设备;
(4)能够指导高职学生完成高质量的企业实习;
(5)能够为企业工程技术人员开设专业技术短训班;
(6)能够胜任校企合作工作,为企业提供技术服务、解决企业实际问题;
(7)骨干教师要定期深入企业生产一线进行实践锻炼;
(8)骨干教师应接受过职业教育教学方法论的培训,具有开发专业课程的能力,能够指导新教师完成上岗实习工作;
(9)青年教师要具备在企业实习一年的工作经历,并经过教师岗前培训。
3.兼职教师要求
兼职教师包括课程任课教师和顶岗实习指导教师。聘请在专业技术与技能方面具有较高水平,具有良好语言表达能力的技术人员、能工巧匠作为兼职教师。
4.主要措施
为满足教学要求,结合已具备的师资情况,工业机器人技术专业在师资建设上主要采取以下措施:
(1)建立教师轮训制度,专业教师每五年企业实践时间累计不少于6个月。
(2)实施“1+1”工程:聘请行业专家或能工巧匠任兼职专业负责人,通过“1+1”的组织架构,使企业、行业需求与发展动向直接融入教学计划的设计与课堂教学之中。
(3)通过参加技能考证、企业践习、技术服务和与企业合作开发项目等多种途径,提升教师的专业技能和社会服务能力。
(4)选聘合作企业的技术人员、能工巧匠担任兼职教师。
(二)教学设施
1、校内主要实训室
工业机器人技术专业与机电一体化技术专业共享专业实训室(见表7)。
表7 校内主要实训室配置一览表
序号 | 实训室 名称 | 硬件软件内容 | 工位 | 功能 |
1 | 普通机加工实训室 | 普通车床、普通铣床 | 20 | 金工实习教学 机械制造技术教学 社会服务 |
2 | 绘图实训室 | 绘图桌椅、绘图板等 | 50 | 机械制图教学 零部件测绘实训 |
3 | 电工电子实训室 | 电工电子实训实训装置 | 20 | 电工技术教学 电子技术教学 电工考证培训 职业技能竞赛培训 在线课程建设 |
4 | 单片机技术实训室 | 单片机实训装置 | 20 | 单片机应用技术教学 职业技能竞赛培训 在线课程建设 |
5 | 自动化生产线实训室 | 自动化生产线 | 16 | 自动化生产线装调技术教学 职业技能竞赛培训 在线课程建设 教研科研 |
6 | PLC技术实训室 | PLC实训装置、匹配电脑 | 20 | 电气控制与PLC技术教学 电工考证培训 职业技能竞赛培训 在线课程建设 |
7 | 电力电子与电气传动实训室 | 电力电子实训装置、 变频器等 | 20 | 电力电子技术 电工(三级)考证 星光计划技能大赛 |
8 | 电机与电气控制实训室 | 电机拖动实训装置 | 20 | 电机及拖动课程教学 电工(四级)考证 |
9 | 检测与转换实训室 | 检测实训装置 | 20 | 自动检测与转换技术教学 职业技能竞赛培训 在线课程建设 |
10 | 液压与气动实训室 | 液压与气动实训装置 | 20 | 液压与气动技术教学 工业机器人技术基础教学 |
11 | 数字化交互实训室 | 电脑 CAD/CAM等仿真软件 | 50 | 计算机辅助设计教学 数控编程与操作教学 职业技能竞赛培训 |
12 | 数控加工实训室 | 数控车床、数控铣床 、数控加工中心等 | 12 | 数控编程与操作 数控实训 数控考证培训 职业技能竞赛培训 |
13 | 机械传动与装调实训室 | 机械常用机构、零部件、常用传动装置等 | 10 | 机械工程基础教学 机械制造技术教学 |
14 | 智能制造虚拟仿真实训室 | 机电仿真、机床仿真、PLC仿真、机器人等仿真系统 | 50 | 电气控制及PLC技术(三菱、PLC)教学 数控编程与操作教学 工业机器人编程教学 自动化生产线装调教学 学生创新设计训练 变频器技术教学 电工电子技术教学等 |
(三)教学资源
1.教材选用基本要求
按照国家规定选用优质教材,禁止不合格的教材进入课堂。建立由专业教师、行业专家和教研人员等参与的教材选用团队,完善教材选用制度,经过规范程序择优选用教材。
2.图书文献配备基本要求
图书文献配备能满足人才培养、专业建设、教科研等工作的需要,方便师生查询、借阅。专业类图书主要包括:装备制造行业政策法规、行业标准、行业规范以及专业相关的工具书;专业技术类图书和实务案例类图书;5种以上专业学术期刊。
3.数字教学资源配备基本要求
建设、配备与本专业有关的音视频素材、教学课件、数字化教学案例库、虚拟仿真软件、数字教材等专业教学资源库,种类丰富、形式多样、使用便捷、动态更新、满足教学。
(四)教学方法
1. 六步教学法:以“做中学、做中教、教学做合一”的教学理念,项目引领,任务驱动,结合小组合作学习、自主探究等学习方式开展教学。课程中每个任务均以“信息、计划、决策、实施、检查、评价”六步法为主要教学过程,并配有引导问题、图表等,将知识与技能的训练、工作能力与职业素养的培养等融入教学环节。培养学生独立思考、创新意思、团队协作等能力。
2.“理实一体”教学:充分利用校内专业实体实训室条件,实现教室与实训室一体,教师与师傅一体,教学与实践一体。开展理实一体教学,将专业理论教学与实践教学融为一体,理论教材与实训教材融为一体、理论教室、实训基地融为一体,实现“教、学、做”一体化。培养学理论联系实际,分析问题和解决问题的能力。
3. “课证赛”融通:将课程教学、职业资格考证、职业技能竞赛等融为一体,培养学生良好的职业竞赛、工匠精神、职业能力和竞争能力。
4.虚实结合教学:构建高度仿真的虚拟实训环境和实训对象,使学生在虚拟环境中进行教学活动,有效弥补教学中看不到、进不去、成本高、危险性大等问题。
(五)教学评价
教学评价融入了整个教学过程,以“过程性+终结性”为评价方式,采用教师、学生、企业、客户四方多元评价贯穿于课前、课中及课后,通过学习通平台实时统计的评价数据,达到以评促教的效果。
十、毕业要求
学生通过三年在校学习,须修满本专业规定的2959学时,142学分;完成规定的教学活动。
表8 毕业要求及指标
毕业要求 | 对应指标点 | 其他 |
人文素质 | 1.德、智、体、美、劳全面发展; 2.具有一定的科学文化水平,良好的人文素养、职业道德和创新意识; 3.具有精益求精的工匠精神,较强的就业能力和可持续发展的能力。 | |
专业能力 | 1.掌握现代工业机器人安装、调试、维护方面的专业知识和操作技能; 2.具备机械结构设计、电气控制、传感技术、智能控制等专业技能; 3. 能够胜任工业机器人系统的基本编程、调试、操作、销售以及车间生产与技术管理等工作。 | |
学历深造 | 掌握本专业及相关专业提升学历(专升本)的专业基础知识。 | |
职业发展 | 掌握本专业及相关专业的专业知识和技能,取得与本专业相适应的职业技能证书。通过企业工作历练和自身努力,可成为技师、高级技师或工程师。 |
编制:李万艳
审定:杨萍